Lan Lu\'s paper accepted by Production and Operations Management
2021-11-22
Lu L. et al. Service Operations for Mixed Autonomous Paradigm: Lane Design and Subsidy. Production and Operations Management (2021) https://doi.org/10.1111/poms.13633
Abstract:
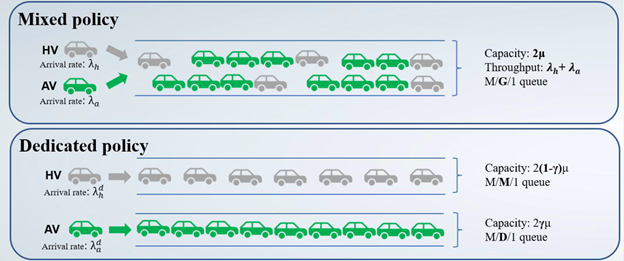
This paper aims to examine and design operational strategies for mixed flows of autonomous vehicles (AVs) and human-driven vehicles (HVs). We propose a stylized model wherein utilitarian individuals either drive HVs or take privately operated AVs that are collectively dispatched. In the baseline mixed policy whereAVs and HVs share the same lanes we find that AVs under-join the traffic (queue) while HVs over-join. We identify a “crowding-out effect" such that AVs will tend to mitigate the over-joining HVs and reduce overall congestion/throughput. To improve the traffic efficiency of the baseline mixed policy we consider a fully dedicated policy in which both AVs and HVs are segregated to different lanes and a partially dedicated policy in which only AVs enjoy dedicated lanes. We find that dedicated policies outperform the mixed policy in both social welfare and the aggregate throughput when the platooning effect is moderate or strong. Exact conditions are derived for the selection of fully dedicated policy and partially dedicated policy. Furthermore we find that a carefully designed subsidy is necessary for the dedicated policy to simultaneously improve the social welfare and the throughput when the platooning effect is very weak. These results shed interesting light on the policy regulation for the emerging mixed autonomous paradigm: a dedicated policy with proper lane design and subsidy (if necessary) will improve both social welfare and aggregate throughput.